Fix a compact Riemannian manifold $(M,g)$. Denote by $\mathrm{Sdiff}(M)$ the set of all volume-preserving diffeomorphisms of $M$.
In Lagrangian coord., incompressible flow $\quad\cong\quad$ path $t\to \Phi_t$ in $\mathrm{Sdiff}(M)$.
Action (no potential energy, purely kinetic):
\[ S[\Phi] = \int_0^T \int_M g|_{\Phi_t(y)}(\partial_t \Phi_t(y), \partial_t \Phi_t(y)) ~dy~dt.\]
Inner integral defines a Riemannian metric on $\mathrm{Sdiff}(M)$. Tangent space $\cong$ divergence-free vector fields; ELE are the Euler Equations
Free Boundary
Initial fluid domain $\Omega_0\subset \mathbb{R}^n$, smooth boundary; $\Omega_t$ later time slice
$\bar\Omega$ space-time domain
Lagrangian / geodesic formulation (?)
EoM should become incompressible Euler with boundary conditions:
\[ \begin{gathered}
\partial_t u + u \cdot \nabla u = - \nabla p \newline
\nabla\cdot u = 0 \newline
p|_{\partial(\Omega_t)} = 0 \newline
(1,u) \parallel \partial\bar{\Omega}\end{gathered} \]
Product Riemannian metric on $\mathbb{R}^n\times \mathsf{SL}(n)$: given \(v,w\in \mathsf{T}_p\mathbb{R}^n\cong \mathbb{R}^n\) and \(\alpha,\beta \in \mathsf{T}_A\mathsf{SL}(n)\cong \mathbb{R}^{n^2}\)
\[ \langle (v,\alpha),(w,\beta)\rangle = v\cdot w + \mathrm{tr}(\alpha I_{\Omega_0} \beta^{\mathsf{T}}). \]
\(S\) is the energy functional for paths on this Riemannian manifold.
Center of mass motion splits from rotation/deformation.
When is a constraint not a constraint?
ELE of constrained motion generally has additional Lagrange multiplier term.
Multiplier vanishes if unconstrained flow is tangent to constraint surface.
Geometrically: if affine group with metric on previous slide is "totally geodesic" within "groupoid replacing $\mathrm{Sdiff}$".
(Sideris [ARMA] 2017) Affine flow is unconstrained IFF $\Omega_0$ is round ball.
Euler equation is satisfied whenever $I_{\Omega_0} = \mathrm{Id}$.
Boundary condition on pressure requires roundness.
Summary
Treat $\mathsf{SL}(n)$ as submanifold of the Euclidean space $M(n)$ of $n\times n$ matrices with Hilbert-Schmidt metric $\langle \alpha,\beta\rangle = \mathrm{tr}(\alpha\beta^{\mathsf{T}})$.
Geodesics are solutions to free boundary fluid flow, with $\Omega_0$ round ball.
What is the geodesic geometry of this Riemannian manifold?
Geodesic completeness? — ✓
Existence / stability of bounded geodesics?
Asymptotic behavior and stability of unbounded geodesics?
2. Preliminary Analyses
Discrete symmetry
\(A \to A^{\mathsf{T}}\) is isometry of \(M(n)\), and fixes \(\mathsf{SL}(n)\), so is isometry on \(\mathsf{SL}(n)\).
Notations
$S(n)$: symmetric $n\times n$ matrices
$\mathring{S}_+(n)$: positive definite elements of $\mathsf{SL}(n)\cap S(n)$
Lemma. $S(n)\cap \mathsf{SL}(n)$ is totally geodesic in \(\mathsf{SL}(n)\).
Corollary. $\mathring{S}_+(n)$ is totally geodesic in \(\mathsf{SL}(n)\).
Continuous symmetries
\(\mathsf{SO}(n)\) acting on \(M(n)\) by matrix multiplication is isometric & fixes \(\mathsf{SL}(n)\)
Distinct left and right actions!
Generate a total of \(n(n-1)\) Killing vector fields
Physical interpretation: $\quad$ angular momentum and vorticity
Every $A\in \mathsf{SL}(n)$ has a unique factorization as $OP$ (or $PO$): $
\begin{cases} O\in \mathsf{SO}(n) \newline P\in \mathring{S}_+(n)\end{cases}$
$\mathsf{SL}(n)$ foliated by cosets
So the geodesics are easy to describe, right?
Problem: Left actions generate right-invariant vector fields and vice versa
... so even with our conserved quantities, the motions on the two factors do not split.
Some definitions
Throat
Call $\mathsf{SO}(n)\subsetneq \mathsf{SL}(n)$ the "throat": it describes the points closest to the origin in $M(n)$.
Second fundamental form
Sign convention: $\mathrm{II}(X,X) \gt 0$ if it curves away from the origin.
Second f.f. defined via normal pointing away from origin of \(M(n)\).
Geodesic equation
Let $X,Y\in \mathsf{T}_A \mathsf{SL}(n)$, then \[ \mathrm{II}(X,Y) = \frac{\mathrm{tr}(A^{-1}X A^{-1}Y)}{|A^{-1}|} \] and the geodesic equation reads
\[ \ddot{A} = \frac{ \mathrm{tr}( A^{-1} \dot{A} A^{-1} \dot{A})}{\mathrm{tr}(A^{-1} A^{-T})} A^{-T}.\]
3. Prior Results
$n = 2$ is special: analysis
Motion is completely integrable: $\dim(\mathsf{SL}(2)) = 3$ and conservation of
Energy
Angular momentum
Vorticity
Used in Roberts-Shkoller-Sideris (CMP 2020) where geodesics are fully classified.
$n = 2$ geodesic classification
The only bounded geodesic orbits the throat
There exists semi-bounded geodesics converging to the throat
All unbounded geodesics are "asymptotically linear" ($\mathrm{II}(\dot{\gamma},\dot{\gamma}) \to 0$)
$n = 2$ is special: geometry
$\mathsf{SL}(2)$ is a warped product $\mathring{S}_+(2) \times_f \mathbb{S}^1$
Use the composite $A\mapsto OAO$ action
double cover of $\mathsf{SL}(2)$ by $\mathring{S}_+(2) \times_f \mathsf{SO}(2)$.
Use $\mathsf{SO}(2) = \mathsf{U}(1)$ and "take square roots"
$\mathsf{SO}(2)$ is abelian:
Composite $OAO$ action is orthogonal to cosets of polar decomposition
Conjugate $OAO^{-1}$ action is tangent to cosets
Decompose as integrable motion on $\mathring{S}_+(2)$ plus fibre motion.
(Private communication from Ben Schmidt)
$n = 3$ prior results
Analyses of some special explicit solutions and their asymptotics
Sideris (ARMA 2017)
$n$-independent prior results
Virial Identity: let $A: t\to M(n)$ a $\mathsf{SL}(n)$-geodesic
\[ \frac{d^2}{dt^2} |A|^2 = \frac{|\dot{A}|^2}{|A|} + \frac{n}{|A|^2} \mathrm{II}(\dot{A}, \dot{A}).\]
Proposition: if additionally $A$ is such that $\mathrm{II}(\dot{A}, \dot{A}) \gt 0$ for all $t \gt t_0$, then $A$ is unbounded and asymptotically linear.
Sideris (ARMA 2017)
Significance of $\mathrm{II}(\dot{A}, \dot{A}) \gt 0$
Rayleigh-Taylor Stability Condition: pressure decreases to zero as one approaches boundary
Related to ill-posedness of full free boundary problem; Ebin (CPDE 1987)
Contrapositive: any bounded geodesic corresponds to unphysical solution to free boundary fluid flow.
Fluid Questions
Ebin's example of illposedness is the $n = 2$ throat rotation.
Unique bad affine flow
Unstable within class of affine flows
What about higher dimensions? How much of the classification theorem persist?
4. Our Results
Higher dimensions are more curvy
Theorem. $\mathsf{SL}(2)$ has bounded sectional curvature.
Theorem. When $n \geq 3$, given $A\in \mathsf{SL}(n)$ and $W\subset \mathsf{T}_A \mathsf{SL}(n)$ a plane, denote by $k(W)$ its sectional curvature. Then:
$k(W) \leq |A^{-1}|^2$ for all $(A,W)$;
There exists a sequence $(A_i, W_i)$ with $|A_i^{-1}| \to \infty\quad$ and $\quad\liminf \dfrac{k(W_i)}{|A_i^{-1}|^{2}} \geq \dfrac14$.
(Remark: the function $A\mapsto |A^{-1}|$ is proper.)
Linear solutions are linearly stable
Linear solutions: those whose images are lines in $M(n)$.
All in the form of $A(t) = A_0(\mathrm{Id} + t M)$ where $M$ nilpotent.
Linear stability: Jacobi fields along such curves grow at most linearly.
Key step: showing for such $A(t)$ the quantity
\[ \left| \mathrm{Riem}(\dot{A}, J, \dot{A}, K) \right| \lesssim \frac{|J|~ |K|}{(1 + t^4)}. \]
Bounded geodesics abound in $n \geq 4$
Theorem. When $n = 2m \geq 4$, for every $\eta \geq |\mathrm{Id}|$, there exists a bounded geodesic $A(t)$ with $|A(t)| \equiv \eta$.
In fact, we can write $A(t) = A_0 \exp (Ct)$ with $A_0 \in \mathring{S}_+(n)$ and $C\in \mathfrak{so}(n)$.
Remark: these are the only "non-linear" "exponential" solutions.
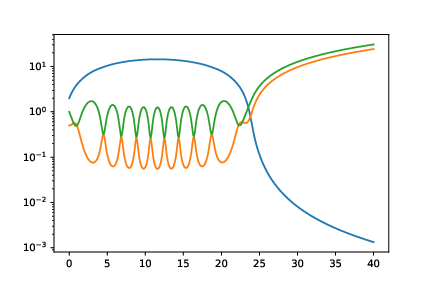
Physical picture: Stationary fluid solution; an ellipsoid with "paired" axes, spinning separately in each plane.
When the rotational speeds are not "tuned", the solutions pulsate. (Some degree of stability, unlike $n = 2$)
Numerical simulation for $n = 6$, for generic data when axes are paired; plots are the three semi-major axial lengths.
Assume $\beta, \omega,\zeta$ decompose into $2\times 2$ blocks (with one $1\times 1$ block when $n$ is odd) along the diagonal.
A boundedness criterion
Theorem. Let $n$ be even. If the initial data of $\beta,\omega$ are built from $2\times 2$ blocks that are pure-trace, and if $\zeta$ has no vanishing bocks, then the solution is bounded.
When $n = 2$, hypothesis only possible with rotation at throat.
"Swirling and shear flows"
Theorem. If the initial data has the form
\[ \beta_0 = \begin{pmatrix} b_1 \mathrm{Id}_{2m} \newline & b_2 \mathrm{Id}_{n - 2m}\end{pmatrix}, \quad \omega_0 = \begin{pmatrix} w_1 \mathrm{Id}_{2m} \newline & w_2 \mathrm{Id}_{n-2m} \end{pmatrix} \]
and writing $\varepsilon$ for the antisymmetric $2\times 2$ matrix
\[ \zeta_0 = \begin{pmatrix} z (\underbrace{\varepsilon \oplus \cdots \oplus \varepsilon}_{m \text{ copies}}) \newline & 0 \end{pmatrix};\]
then the corresponding solution is unbounded, and asymptotically linear.
Sideris (ARMA 2017) described $n = 3$ and $m = 1$ with explicit integration
Further generalization?
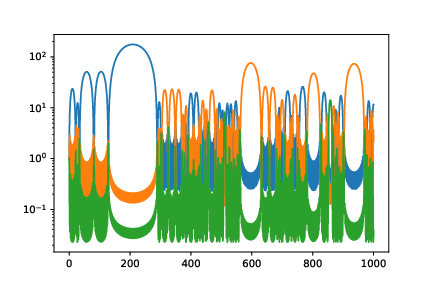
Numerical simulation of a generalized swirling and shear flow with three sets of axes, instead of two.
Application: Asymptotically linear solutions can be unstable
Let $A(t)$ be a swirling and shear flow: we can show that $\mathrm{II}(\dot{A}, \dot{A})$ is eventually positive.